The Unreasonable Power of The Unscented Kalman Filter with ROS 2

Unidimensional Kalman Filter on ROS2 Turtlesim using python + rqtПодробнее

Sensor Fusion with the Extended Kalman Filter in ROS 2: 8-D StateПодробнее
Visually Explained: Kalman FiltersПодробнее
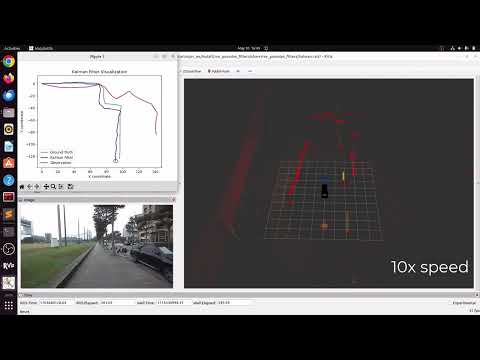
Recursive State Estimation with Kalman Filters and ROS 2 - Default SettingsПодробнее

Sensor Fusion with the Extended Kalman Filter in ROS 2: 7-D StateПодробнее
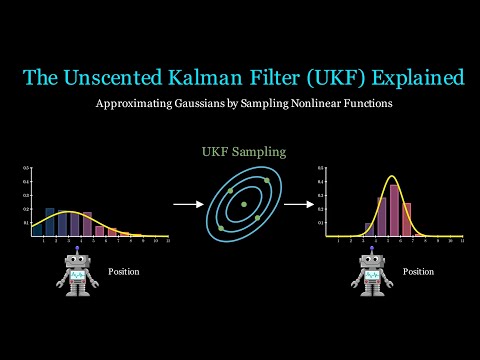
The Unscented Kalman Filter (UKF): A Full Tutorial. PS. Sampling Methods are AmazingПодробнее
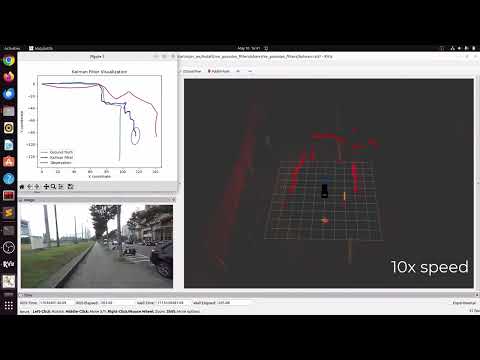
Recursive State Estimation with Kalman Filters and ROS 2 - Trust the MeasurementsПодробнее

Extended Kalman Filter SLAM on a TurtleBot3Подробнее

Unscented Kalman FilterПодробнее

Unscented Kalman Filter Object TrackingПодробнее

State Estimation with Kalman Filters in ROS 2 | Thisas Ranhiru Samaraweera | RoboticsDevDay 2024Подробнее

Recursive State Estimation with Kalman Filters and ROS 2 - Trust the Motion ModelПодробнее
Kalman filter sample assuming noise environment on ROS2Подробнее

Unscented Kalman FilterПодробнее
